• ВСЕ, ЧТО ВЫ ХОТЕЛИ ЗНАТЬ О МОДЕМАХ, НО БОЯЛИСЬ СПРОСИТЬ •
:: Модемы. Справочник пользователя ::
Публикуется с разрешения автора!
Автор: Лагутенко Олег Иванович, к.т.н.
Источник: http://laguten.chat.ru
ГЛАВА 2
УСТРОЙСТВО СОВРЕМЕННЫХ МОДЕМОВ
2.1. Общие сведения
Сведения о внутреннем устройстве и архитектуре современных модемов не настолько доступны, как, например, информация об устройстве персональных компьютеров. Одной из причин этого является отсутствие каких бы то ни было промышленных стандартов на конструкцию модемов. Другая причина состоит в том, что современные модемы, как правило, строятся на наборах специализированных микросхем, которые реализуют основные модемные функции. Число производителей наборов модемных микросхем значительно меньше числа производителей собственно модемов. Однако все же их недостаточно для того, чтобы можно было вести речь о какой-либо унификации модемных комплектующих. Основными производителями специализированных наборов являются фирмы Rockwell, Intel, AT&T, Sierra Semiconductor, National Semiconductor, Motorola, Exar и некоторые другие. Ряд известных компаний, таких как U.S. Robotics, Telebit, ZyXEL, самостоятельно занимается разработкой и производством модемных микросхем для своих нужд. Некоторые производители при построении модемов используют микросхемы общего назначения — цифровые процессоры и микроконтроллеры.
Казалось бы каждый производитель модемов волен делать, что хочет и как хочет. Однако, это не так. В рамках такой "свободы" производитель должен создать конкурентоспособный продукт, удовлетворяющий множеству стандартных модемных протоколов, которые, в свою очередь, налагают определенные требования на количество и качество его функций. Эти требования приводят к тому, что в отличных по конструкции модемах одни и те же методы и протоколы реализованы различными способами. Один из вариантов исполнения модема можно представить в виде, изображенном на рис. 2.1.
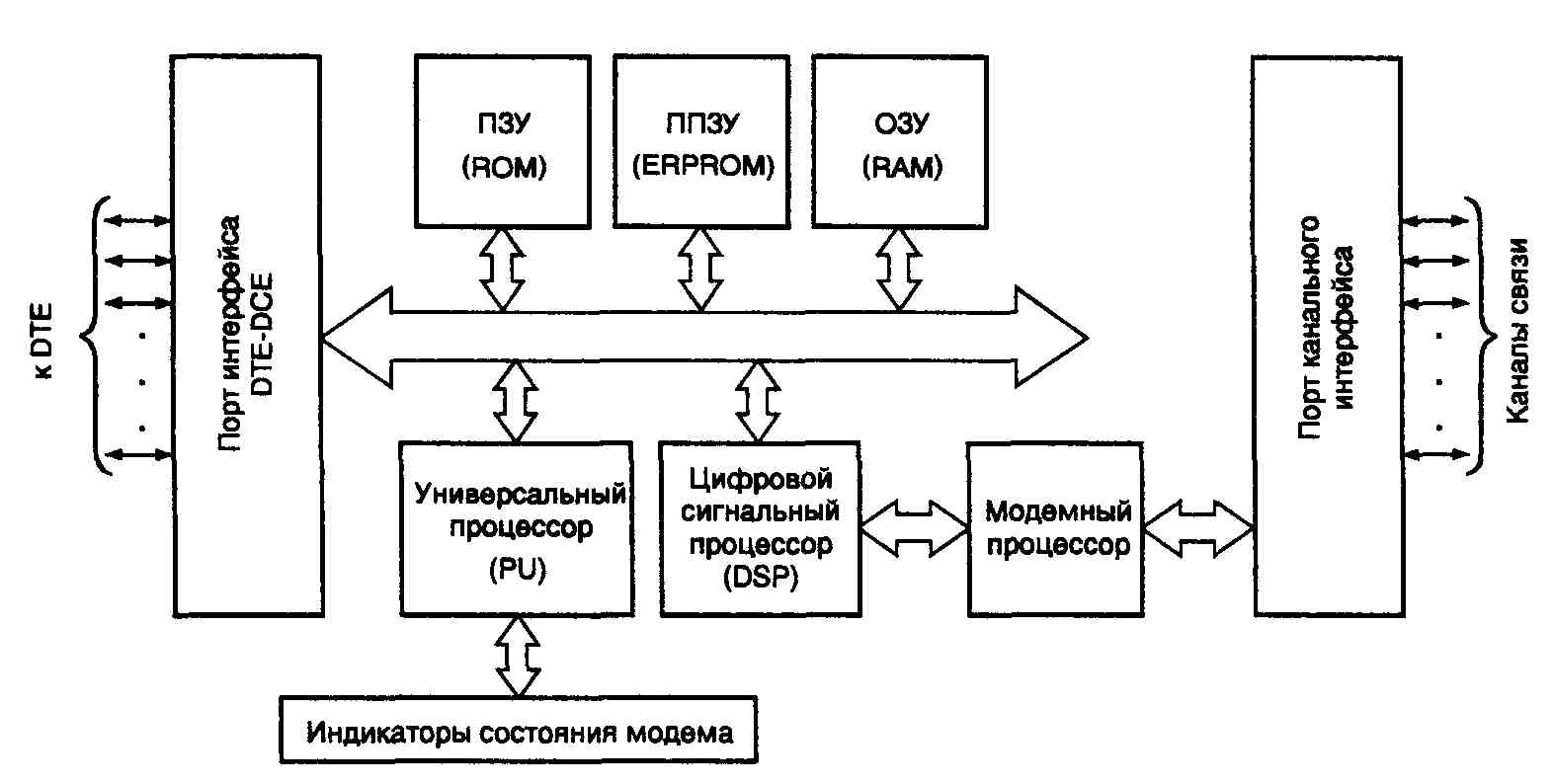
Модем состоит из адаптеров портов канального и DTE—DCE интерфейсов; универсального (PU), сигнального (DSP) и модемного процессоров; постоянного (ПЗУ, ROM), постоянного энергонезависимого перепрограммируемого (ППЗУ, ERPROM) оперативного (ОЗУ, RAM) запоминающих устройств и схемы индикаторов состояния модема.
Порт интерфейса DTE—DCE обеспечивает взаимодействие с DTE. Возможные варианты реализации интерфейса DTE — DCE подробно рассматриваются в разделе 3.1. Если модем внутренний, вместо интерфейсов DTE—DCE может применяться интерфейс внутренней шины компьютера ISA. Порт канального интерфейса обеспечивает согласование электрических параметров с используемым каналом связи. Канал может быть аналоговым или цифровым, с двух- или четырехпроводным окончанием.
Универсальный процессор выполняет функции управления взаимодействием с DTE и схемами индикации состояния модема. Именно он выполняет посылаемые DTE АТ-команды и управляет режимами работы остальных составных частей модема. Также универсальный процессор может реализовывать операции компрессии/декомпрессии передаваемых данных (см. гл. 8).
Интеллектуальные возможности модема определяются в основном типом используемого PU и микропрограммой управления модемом, хранящейся в ROM. Путем замены или перепрограммирования ROM иногда можно достичь существенного улучшения свойств модема, то есть произвести его модернизация, или апгрейд (upgrade). Такого рода модернизация некоторых моделей модемов может обеспечить поддержку новых протоколов или сервисных функций, таких как автоматическое определение номера (АОН) вызывающего абонента. Для облегчения такой модернизации в последнее время вместо микросхем ROM стали широко применяться микросхемы флэш-памяти (FlashROM).
Схема ERPROM позволяет сохранять установки модема в так называемых профайлах или профилях модема на время его выключения. Память RAM интенсивно используется для временного хранения данных и выполнения промежуточных вычислений как универсальным, так и цифровым сигнальным процессорами.
На сигнальный процессор, как правило, возлагаются задачи по реализации основных функций протоколов модуляции (кодирование сверточным кодом, относительное кодирование, скремблирование и т.д.), за исключением разве что собственно операций модуляции/демодуляции. Последние операции обычно выполняются специализированным модемным процессором.
Описанное распределение функций между составными частями модема может быть, и скорее всего будет, совсем не таким, какое реализовано в вашем конкретном модеме. Однако внутренней начинкой современного модема все эти функции в той или иной мере должны выполняться.
Ниже подробнее остановимся на устройстве аналоговых (для телефонных каналов) и цифровых модемах и основных их функциях, связанных с обработкой сигналов. Согласно рис. 2.1 эти функции реализуются цифровым сигнальным процессором, модемным процессором и собственно канальным интерфейсом.
2.2. Состав модема для КТСОП
Большинство современных модемов для телефонных каналов КТСОП обеспечивают синхронную передачу данных по каналу. Поэтому, кратко остановимся на функциональном устройстве и работе именно таких модемов.
В самом общем виде синхронный модем содержит приемник, передатчик, компенсатор электрического эха, схему управления и, возможно, источник питания (рис. 2.2). Схема управления, как правило, исполняется в виде микропроцессора универсального назначения (PU на рис. 2.1), и предназначена для обеспечения интеллектуального интерфейса с DTE и управления работой приемника, передатчика и эхо-компенсатора.
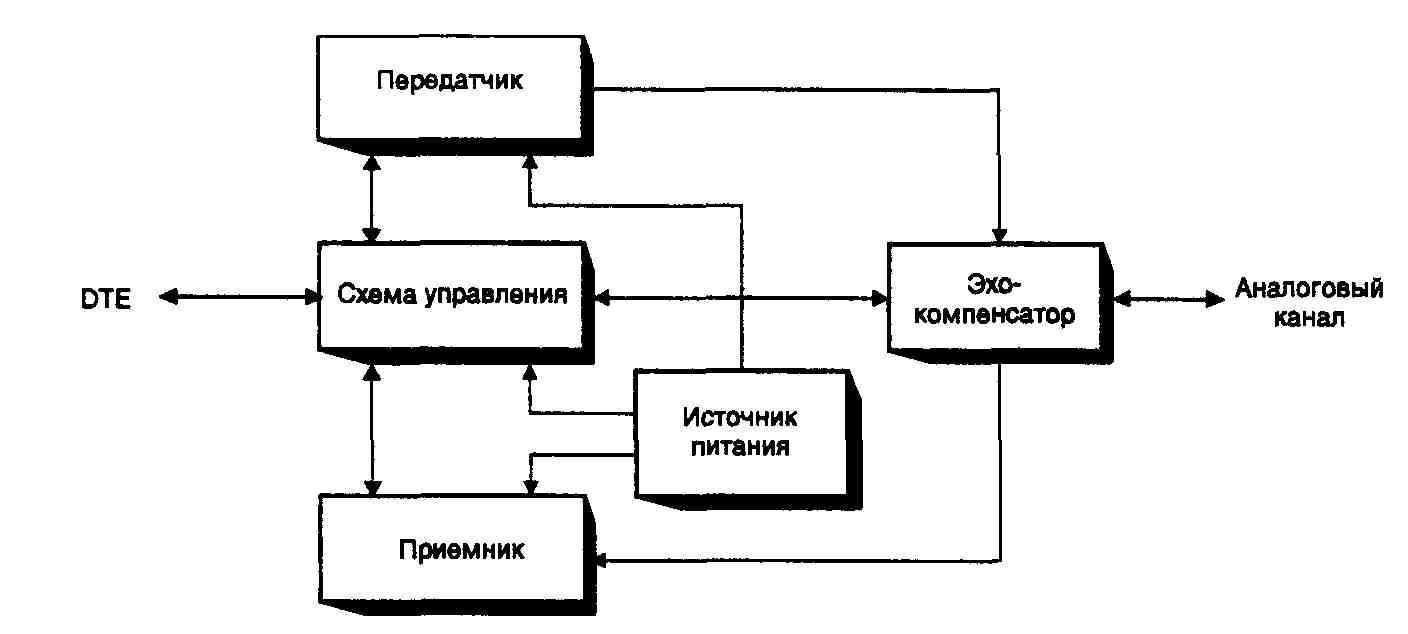
Эхо-компенсатор предназначен для ослабления вредного влияния помехи в виде электрического эха (собственного отраженного сигнала) на прием сигнала от удаленного модема. Работа эхо-компенсатора подробнее будет рассмотрена ниже.
Передаваемые DTE данные поступают в передатчик модема, который выполняет операции скремблирования, относительного кодирования, синхронизации и иногда вносит предыскажения, частично компенсирующие нелинейность амплитудой и фазочастотной характеристик (АЧХ и ФЧХ) используемого телефонного канала. Схема передатчика приведена на рис. 2.3.
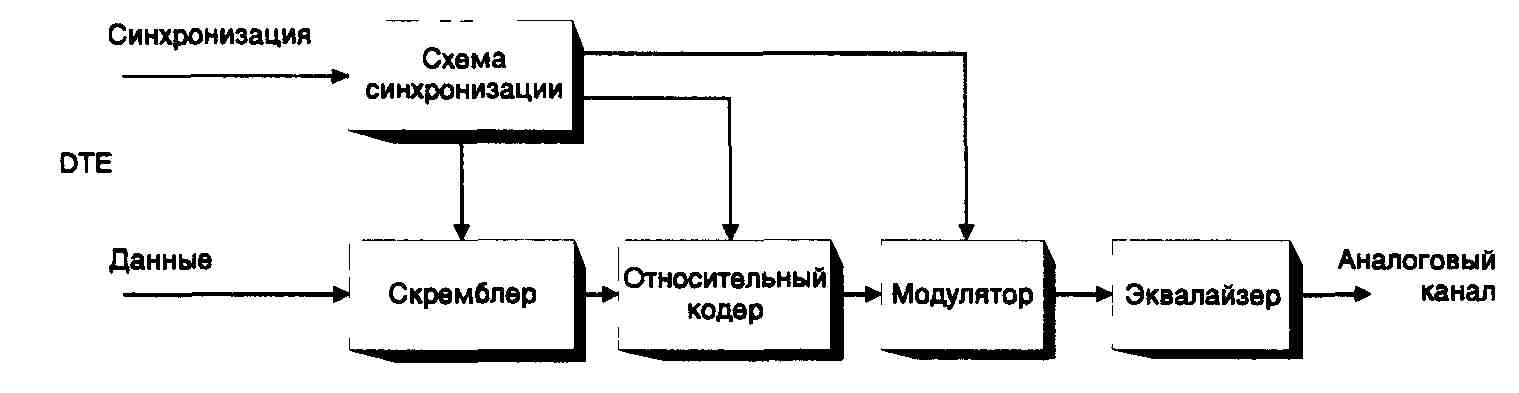
Схема синхронизации передатчика получает сигнал опорной частоты от внутреннего генератора или получать его от DTE, например, через 24 контакт разъема DB-25 интерфейса RS-232. В последнем случае модем обязан поддерживать синхронный режим работы не только по каналу с удаленным модемом, но и по интерфейсу DTE-DCE. Скремблер предназначен для придания свойств случайности (рандомизации) передаваемой последовательности данных с целью облегчения выделения тактовой частоты приемником удаленного модема. При использовании сигналов ФМ и производных от них, применение относительного кодирования позволяет решить проблему неоднозначности фазы, восстановленной на приеме несущей.
Приемник типового синхронного модема в свою очередь содержит адаптивный эквалайзер со схемой управления, модулятор с задающим генератором, демодулятор, относительный декодер, дескремблер и схему синхронизации (рис. 2.4).
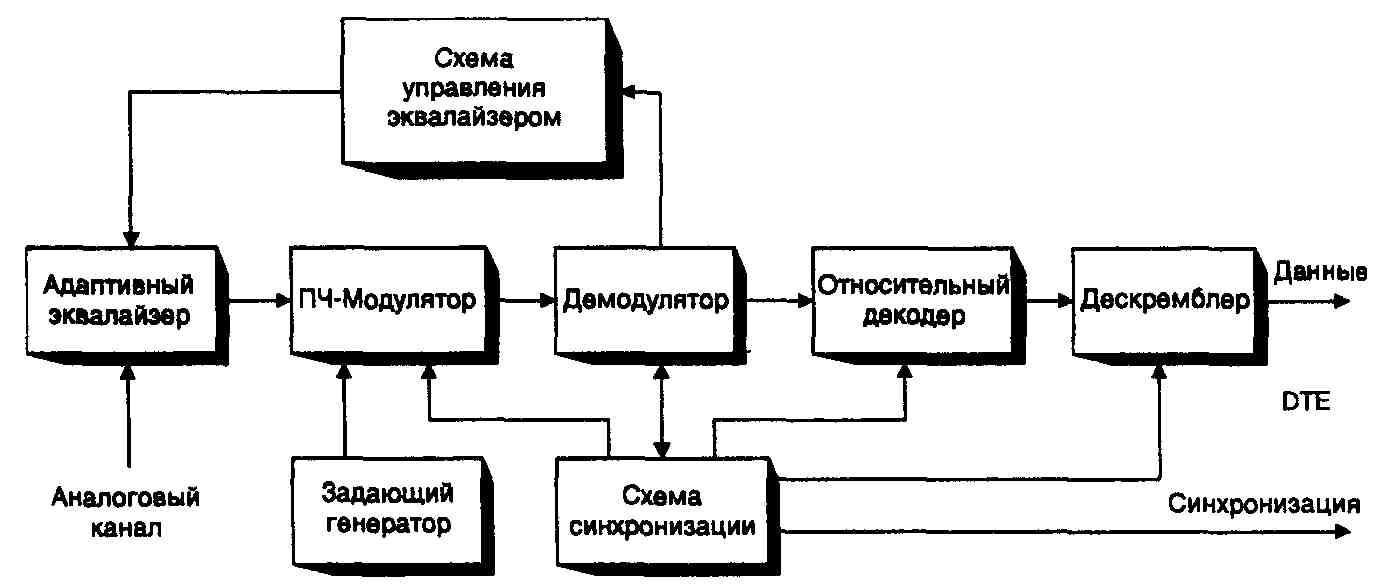
Модулятор приемника совместно с задающим генератором позволяют перенести спектр принимаемого сигнала (300—3400 Гц) в область более высоких частот. Это делается для облегчения операций фильтрации и демодуляции. Относительный декодер и дескремблер выполняют операции, обратные выполняемым в передатчике. Схема синхронизации выделяет тактовую частоту из принимаемого сигнала и подает его на другие узлы приемника.
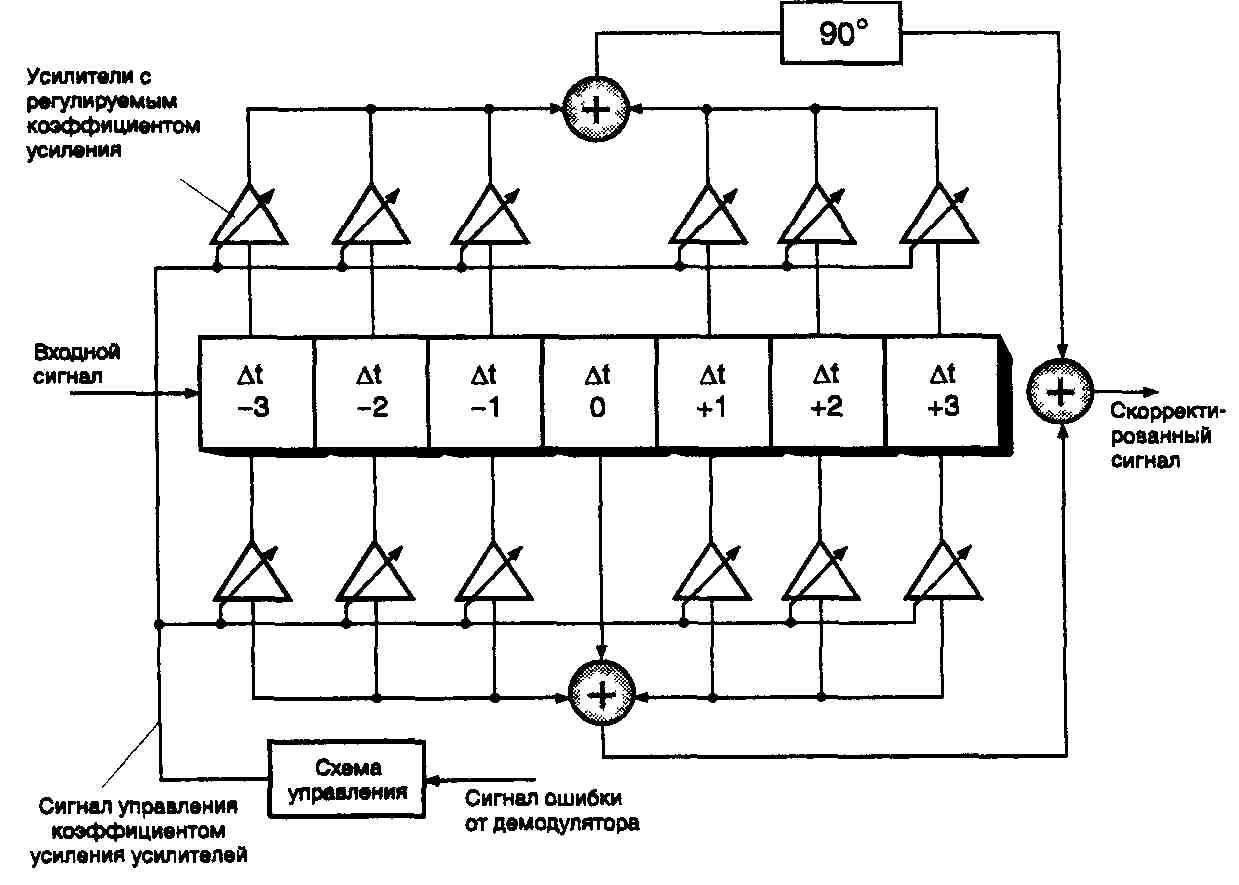
Адаптивный эквалайзер приемника, как и эквалайзер передатчика, позволяет компенсировать нелинейные искажения, вносимые каналом передачи. Адаптивность эквалайзера заключается в его способности подстраиваться под изменяющиеся параметры канала в течение сеанса связи. Для этого сигнал ошибки фазы с демодулятора поступает на схему управления, которая вырабатывает управляющие сигналы для эквалайзера. Сам эквалайзер состоит из линии задержки с отводами и набора управляемых усилителей с изменяемым коэффициентом усиления (рис. 2.5).
Более подробно остановимся на работе таких блоков синхронного модема, как скремблер и эхо-компенсатор.
2.3. Скремблирование
Двоичный сигнал на входе модема может иметь произвольную статистическую структуру, которая не всегда удовлетворяет требованиям, предъявляемым синхронным способом передачи. Среди этих требований основными являются следующие.
- Частота смены символов (1, 0) должна обеспечивать надежное выделение тактовой частоты непосредственно из принимаемого сигнала.
- Спектральная плотность мощности передаваемого сигнала должна быть, по возможности, постоянной и сосредоточенной в заданной области частот с целью снижения взаимного влияния каналов.
Приведенные требования должны выполняться независимо от структуры передаваемого сообщения. Поэтому в синхронных модемах исходная последовательность двоичных посылок часто подвергается определенной обработке. Смысл такой обработки состоит в получении последовательности, в которой статистика появления нулей и единиц приближается к случайной, что позволяет удовлетворить двум названным выше требованиям.
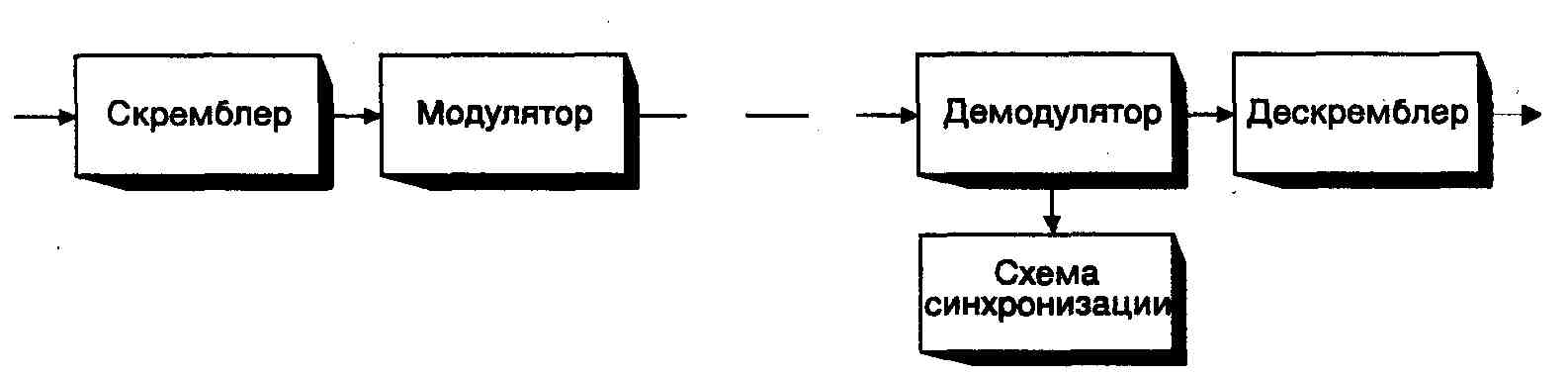
Одним из способов такой обработки является скремблирование (scramble — перемешивание). Скремблирование — это обратимое преобразование структуры цифрового потока без изменения скорости передачи с целью получения свойств случайной последовательности. Скремблирование производится на передающей стороне с помощью скремблера, реализующего логическую операцию суммирования по модулю два исходного и псевдослучайного двоичных сигналов. На приемной стороне осуществляется обратное преобразование — дескремблирование, выполняемое дескремблером. Дескремблер выделяет из принятой последовательности исходную информационную последовательность. На рис. 2.6 показано включение скремблера и дескремблера в канал связи.
Основной частью скремблера является генератор псевдослучайной последовательности (ПСП) в виде линейного u-каскадного регистра с обратными связями, формирующий последовательность максимальной длины 2u-1. Различают два основных типа скремблеров-дескремблеров — самосинхронизирующиеся и с начальной установкой (аддитивные).
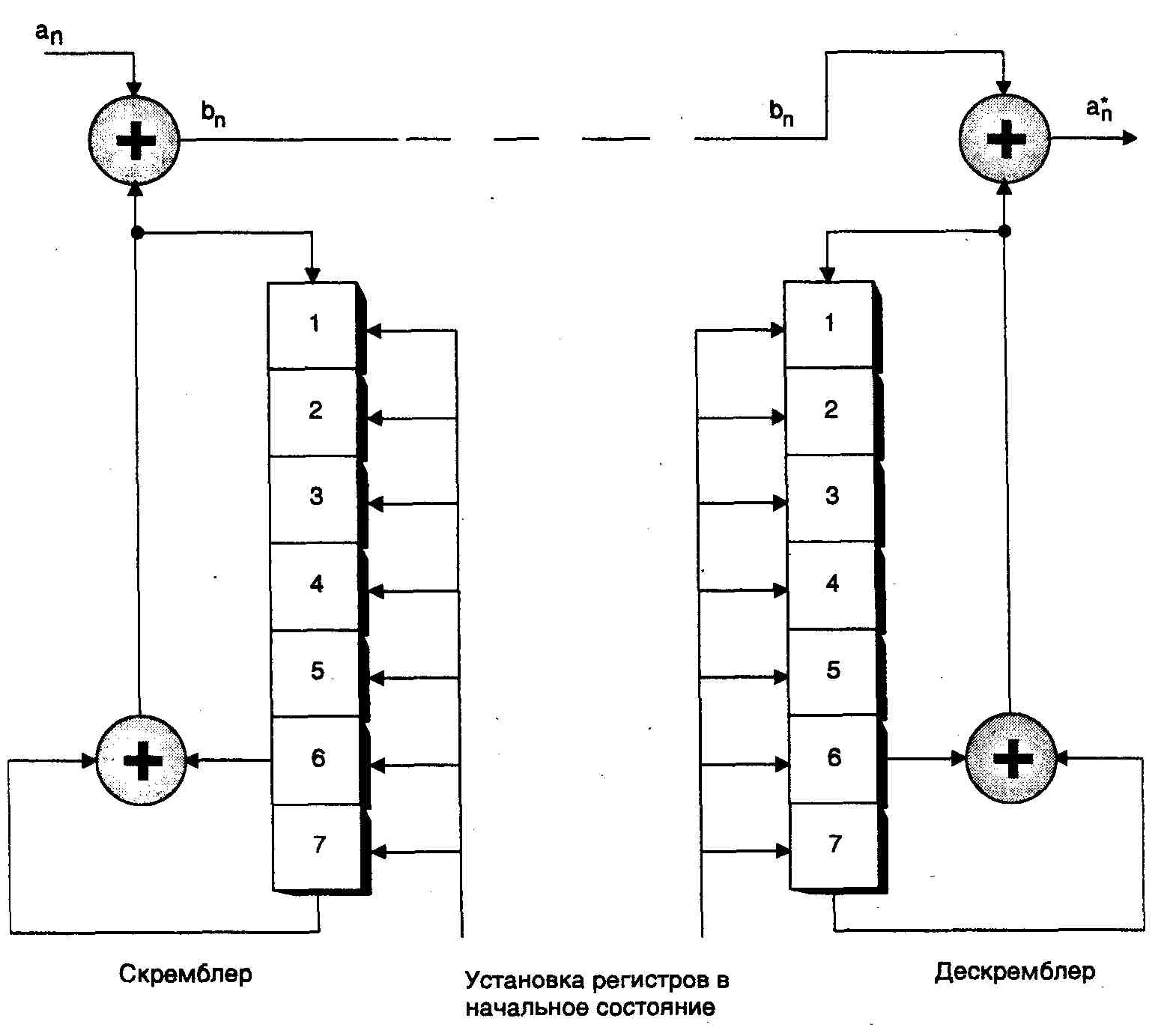
Схема пары самосинхронизирующихся скремблер-дескремблер представлена на рис. 2.7. Особенностью самосинхронизирующего скремблера является то, что он управляется самой скремблированной последовательностью, т.е. той, которая поступает в канал. Поэтому в данном случае не требуется специальной установки состояний скремблера и дескремблера, поскольку они оказываются идентичными в результате записи в их регистры сдвига скремблированной последовательности.
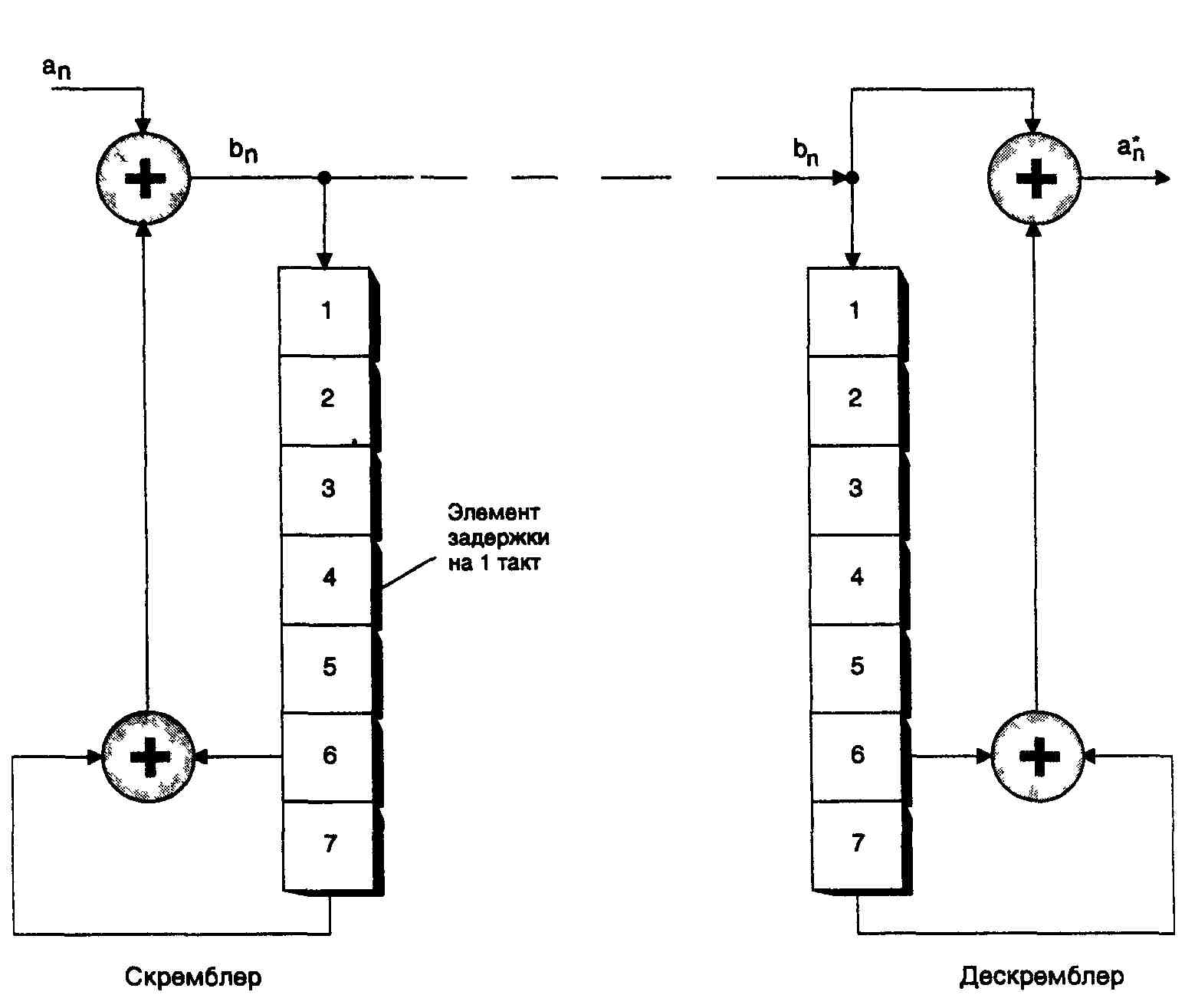
При потере синхронизма между скремблером и дескремблером время его восстановления не превышает числа тактов, равного числу ячеек регистра скремблера. На приемной стороне выделение информационной последовательности происходит сложением по модулю два принятой скремблированной последовательности с псевдослучайной последовательностью (ПСП) регистра. Например, для схемы, изображенной на рис. 2.7, входная последовательность an с помощью скремблера в соответствии с выражением
преобразуется в двоичную последовательность Ь„, посылаемую в канал. В приемнике из этой последовательности таким же регистром сдвига, как и на передаче, формируется последовательность
которая идентична последовательности a„. Это легко проверяется при преобразовании первого выражения к виду
и сравнении полученного выражения с предыдущим.
Одним из недостатков самосинхронизирующих скремблеров-дескремблеров является присущее им свойство размножения ошибок. Так, для схемы на рис. 2.7 при одной ошибке в последовательности bn ошибочными оказываются также 6-й и 7-й символы. В общем случае влияние ошибочно принятого бита будет проявляться α раз, где α — число обратных связей. Данный недостаток ограничивает число обратных связей в регистре сдвига, которое практически не превышает α=2, т.е. полином регистра является триномом вида xu+xu+1. Второй недостаток самосинхронизирующихся скремблеров связан с возможностью появления на его входе так называемых "критических ситуаций", когда выходная последовательность приобретает периодический характер с периодом, меньшим длины ПСП. Для предотвращения таких ситуаций в скремблере и дескремблере согласно рекомендациям ITU-T предусматриваются специальные дополнительные схемы контроля, которые выявляют периодичность элементов на входе и нарушают ее.
Недостатки, присущие самосинхронизирующим скремблеру-дескремблеру, практически отсутствуют при аддитивном скремблировании (рис. 2.8).
Однако в этом случае требуется предварительная идентичная установка состояний регистров скремблера и дескремблера. В скремблере с начальной установкой, как и в самосинхронизирующем скремблере, производится суммирование входного сигнала и ПСП, но результирующий сигнал не поступает на вход регистра. В дескремблере скремблированная последовательность также не проходит через регистр сдвига, поэтому размножения ошибок не происходит. Суммируемые в скремблере последовательности независимы, поэтому критических ситуаций не наступает. Отсутствие эффекта размножения ошибок и необходимость специальной защиты от нежелательных ситуаций делают способ аддитивного скремблирования предпочтительнее и экономически эффективнее, если не учитывать затрат на решение задачи взаимной синхронизации пары скремблер-дескремблер.
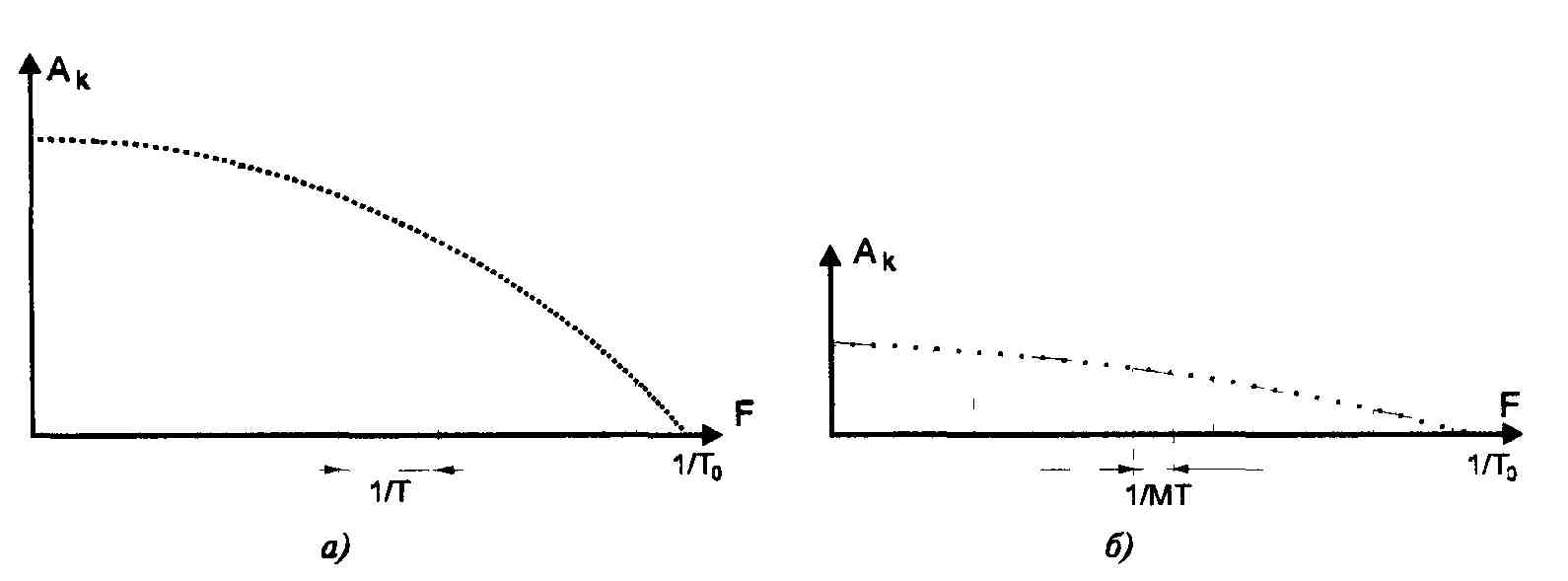
Рассмотрим влияние скремблирования на энергетический спектр двоичного сигнала. На рис. 2.9, а изображен пример энергетического спектра для периодического сигнала с периодом Т, содержащим 6 двоичных элементов с длительностью Т0. После скремблирования ПСП с М=2u-1 элементами спектр существенно "обогащается" (рис. 2.9, б). В примере число составляющих спектра увеличилось в М раз, одновременно уровень каждой составляющей уменьшается в такое же число раз.
2.4. Эхо-подавление
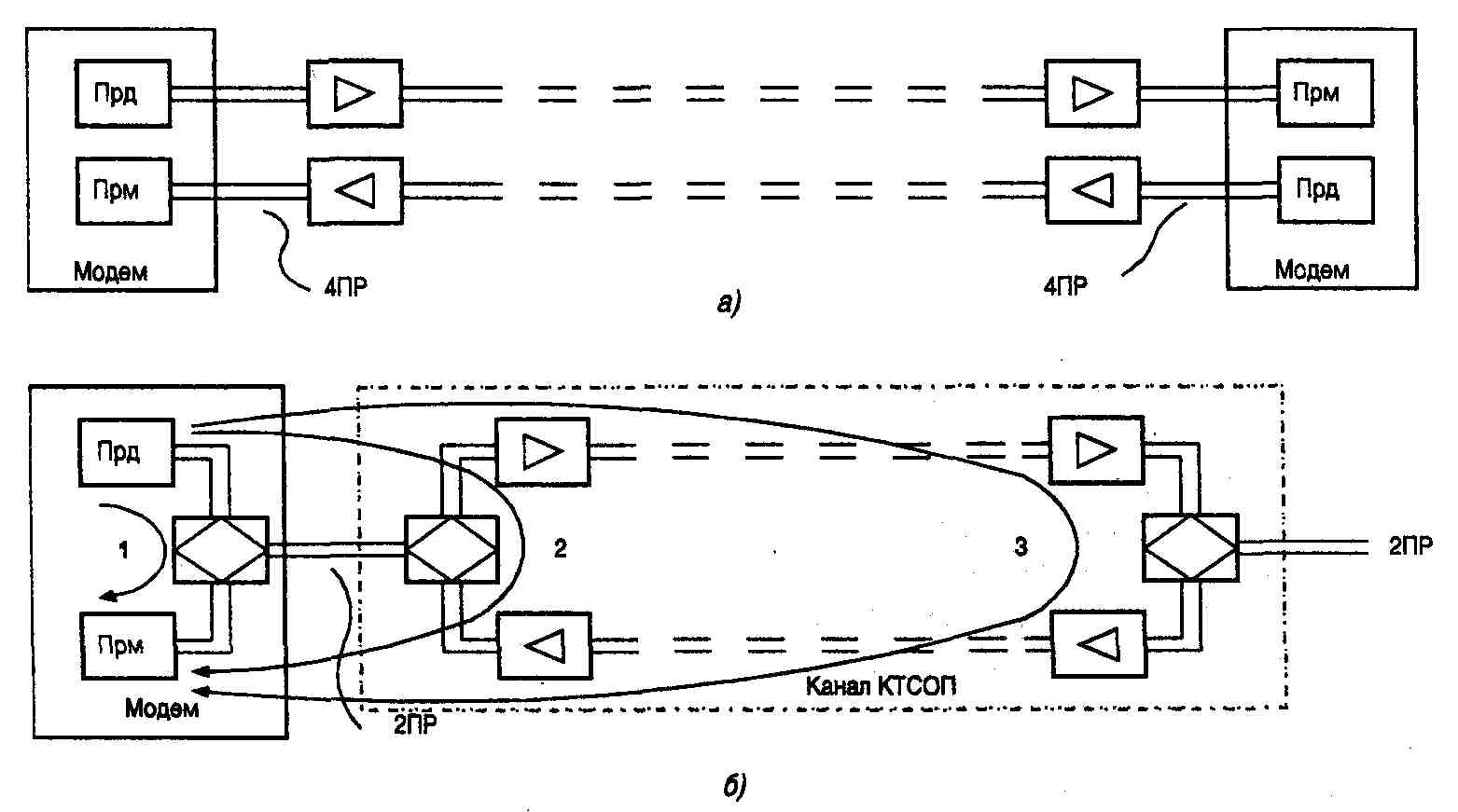
Организация дуплексной высокоскоростной передачи является не простой задачей при использовании коммутируемых каналов с двухпроводным окончанием. В отличие от выделенных четырехпроводных каналов (рис. 2.10, а), характерной особенностью телефонного канала КТСОП является наличие участков перехода двухпроводной части канала в четырехпроводную. Переход осуществляется при помощи дифференциальных систем (ДC), обеспечивающих необходимое затухание по встречным направлениям передачи. Если эти затухания очень велики, то схему связи можно практически считать четырехпроводной, представляещей собой электрически разомкнутую систему. Однако идеальных дифференциальных систем не существует. В результате, как и во всякой электрически замкнутой системе, в двухпроводном телефонном канале присутствуют токи обратной связи, вызывающие искажения амплитудно-частотных и фазочастотных характеристик прямого и обратного каналов. В качестве примера на рис. 2.10, б приведена типичная схема модемного канала с тремя дифференциальными системами и, соответственно, тремя путями прохождения эхо-сигналов. Собственный отраженный и задержанный сигнал поступает на вход демодулятора, являясь для него помехой. Чем большей задержкой обладает эхо-сигнал, тем труднее с ним бороться.
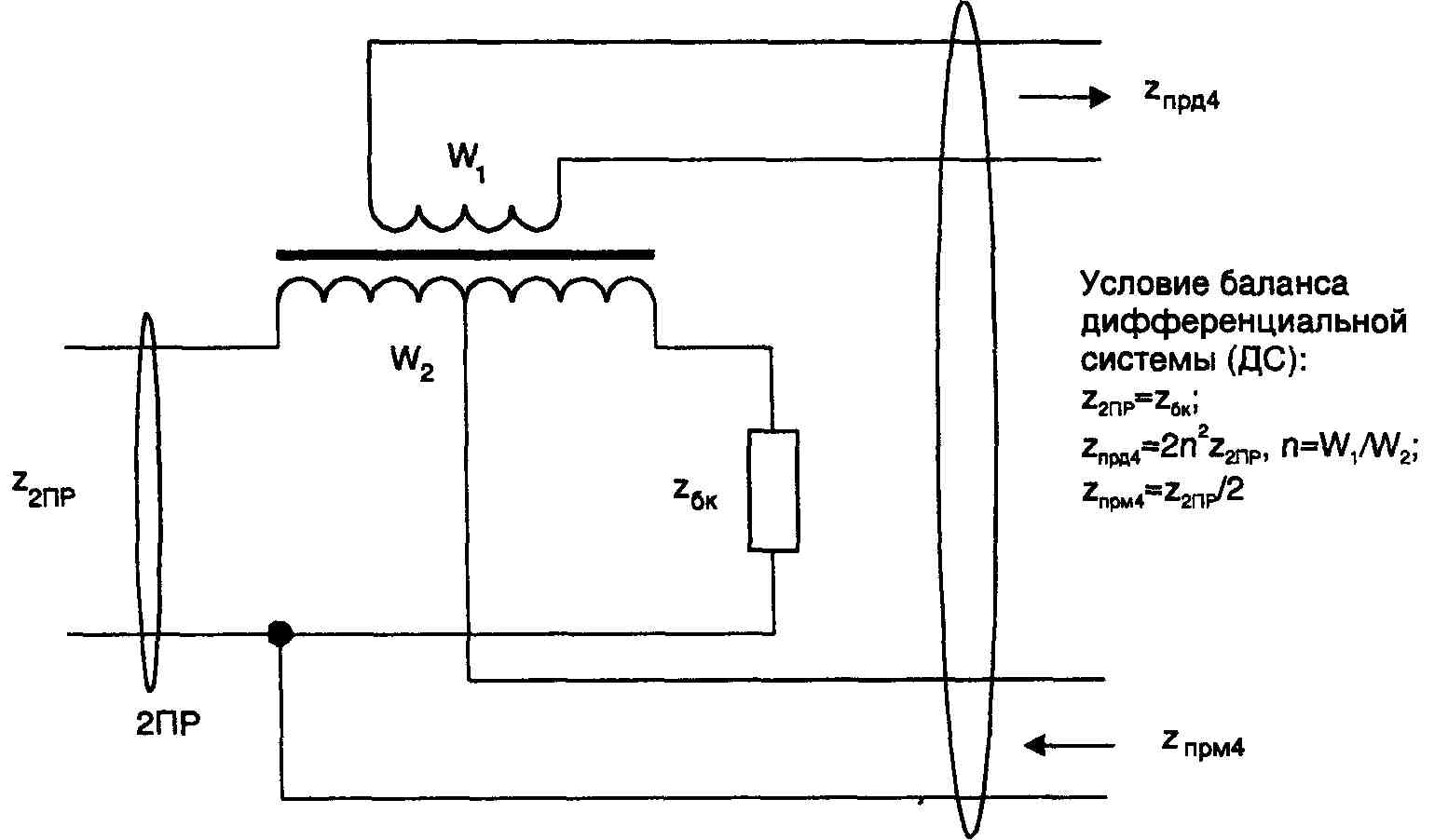
Рассмотрим один из возможных вариантов дифференциальных систем — мостовую трансформаторную дифференциальную систему (рис. 2.11). Такая дифференциальная система будет обеспечивать достаточное затухание (более 50 дБ) во встречных направлениях приема-передачи лишь при условии выполнения ее баланса. Однако обеспечить точный баланс не так просто, как может показаться на первый взгляд. Причиной этому является как изменения комплексных сопротивлений двух- (Z2пр) и четырехпроводных (Zпрд4 и Zпрм4) линий, так и их несоответствие номинальным значениям. Это происходит вследствие, например, неодинаковой длины и различного качества абонентских линий, или в случае параллельного подключения модема к телефонному аппарату.
Известны так называемые самобалансирующиеся дифференциальные системы, автоматически подстраиваемые под параметры используемой линии связи. Их рассмотрение выходит за рамки данной книги. Стоит лишь отметить, что они представляют собой достаточно сложные электронные устройства.
Для борьбы с электрическим эхом возможно использование следующих методов:
- частотное разделение каналов;
- применение самобалансирующихся дифференциальных систем;
- компенсация зхо-сигнала.
При использовании первого метода вся полоса пропускания канала разделяется на два частотных подканала, по каждому из которых передается сигнал в одном направлении. Очевидно, в этом случае нет возможности использовать полосу канала в полном объеме. Более того, для исключения проникновения боковых гармоник между подканалами приходится вводить защитный частотный интервал. В результате этого подканалы займут меньше половины полной полосы пропускания канала. Существующие протоколы модуляции с частотным разделением каналов, например V.21 и V.22, обеспечивают симметричную дуплексную связь со скоростью не выше 2400 бит/с. Ряд протоколов с частотным разделением, например HST, обеспечивает и более скоростную связь, но в одном направлении. В то время как скорость передачи по обратному каналу значительно меньше. Такая разновидность дуплексной связи называется асимметричной.
Применение автоматически настраиваемых дифференциальных систем экономически невыгодно из-за высокой сложности их технической реализации.
В связи с этим наибольшее распространение получил компенсационный метод борьбы с эхо-сигналом. Суть метода заключается в том, что модем, обладая информацией о своем собственном передаваемом сигнале Sпрд(t), может использовать ее для фильтрации принимаемого сигнала Sпрм(t) от эхо-помехи. Отраженный эхо-сигнал E(t) претерпевает существенные изменения вследствие амплитудных и фазовых искажений. На этапе установления соединения каждый модем посылает определенный зондирующий сигнал и определяет параметры эхо-отражения: время запаздывания, амплитудные и фазовые искажения, мощность отраженного сигнала. В процессе сеанса связи эхо-компенсатор модема вычитает из принимаемого входного сигнала свой собственный выходной E*(t), скорректированный в соответствии с полученными параметрами эхо-отражения. Функцию создания копии эхо-сигнала выполняет линия задержки с отводами, схема которой приведена на рис. 2.12.
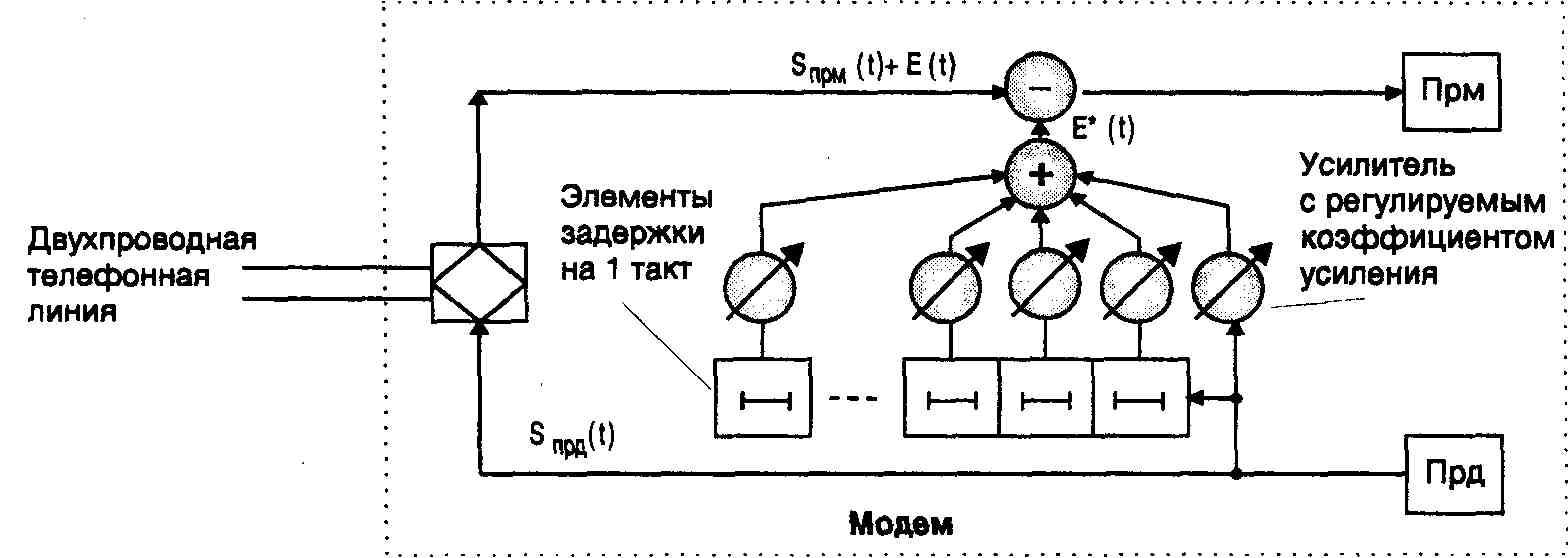
Технология эхо-компенсации позволяет отвести для дуплексной передачи всю ширину полосы пропускания телефонного канала, однако требует немалых вычислительных ресурсов для обработки сигнала.
2.5. Устройство цифрового модема
Как уже отмечалось, к цифровым модемам можно отнести такие устройства, как CSU/DSU (Channel Service Unit/Data Service Unit), терминальные адаптеры ISDN, а также модемы на короткие расстояния (Short Range Modem). По выполняемым функциям цифровые модемы очень похожи на модемы для аналоговых каналов связи. За исключением самых простейших, цифровые модемы обладают интеллектуальными функциями и поддерживают набор АТ-ко-манд. В первую очередь это относится к цифровым модемам, работающим на коммутируемых линиях, например, в сетях ISDN. В качестве примера цифрового модема рассмотрим устройство CSU/DSU.
Устройства CSU/DSU применяются для передачи данных по цифровым каналам типа Е1/Т1, Switched 56 и другим. CSU обеспечивает правильное согласование с используемым цифровым каналом и частотную коррекцию линии. CSU также поддерживает выполнение проверок по шлейфу. На CSU часто устанавливаются световые индикаторы, сигнализирующие об обрыве местных линий, потери связи со станцией, а также о работе в режиме проверки по шлейфу. Питание CSU может осуществляться отдельным источником питания, либо посредством самой цифровой линии.
Модули обслуживания данных, или цифровые служебные модули DSU включаются в цепь между CSU и DTE (рис. 2.13), в качестве которого часто выступает не только компьютер, но и различное сетевое оборудование, например, маршрутизатор, мост, мультиплексор или сервер. На DSU обычно устанавливается интерфейс RS-232 или V.35. Основной задачей DSU является приведение потока цифровых данных, поступающих от DTE в соответствие со стандартом, принятым для данной цифровой линии.
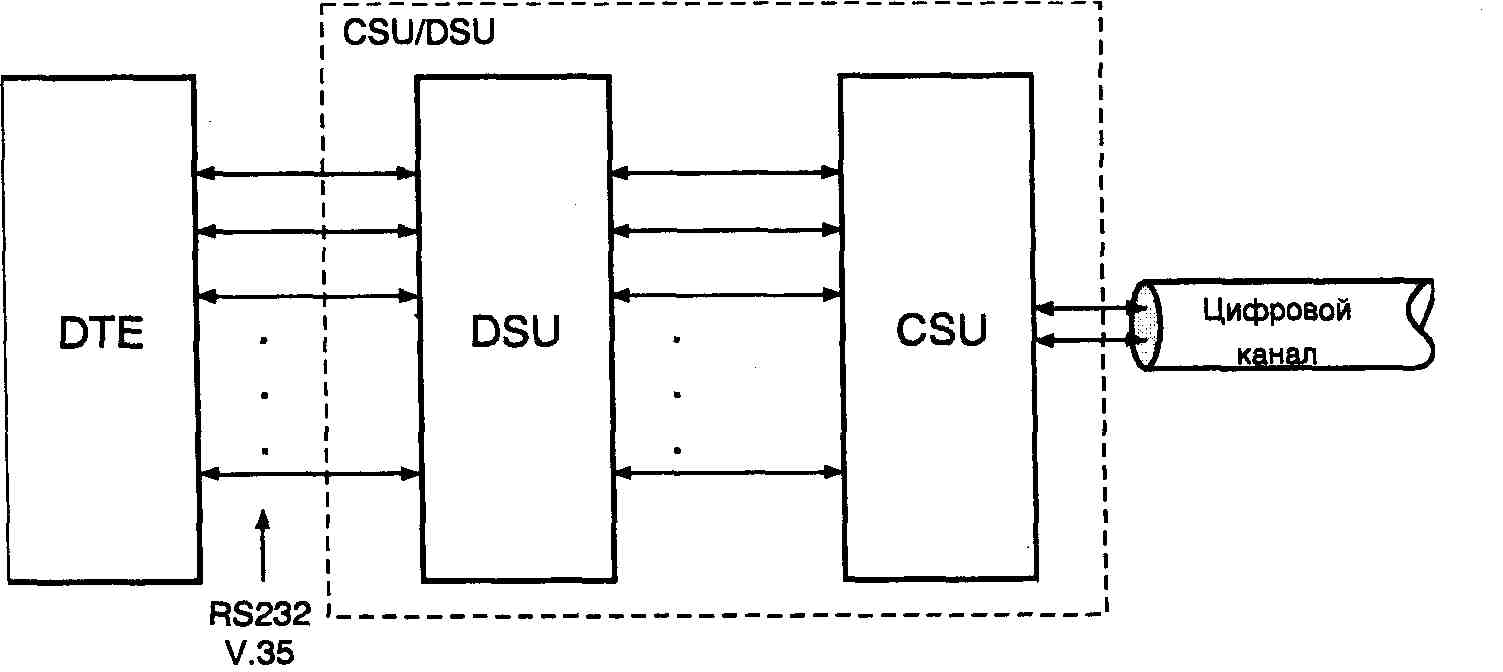
Можно провести аналогию с аппаратурой для сетей ISDN. В этом случае CSU играют примерно ту же роль, что и NT1, а DSU похожи на терминальные адаптеры ISDN. DSU часто встраивают в другие устройства, например мультиплексоры. Но чаще их комбинируют с CSU. При этом получается единое устройство, именуемое CSU/DSU или DSU/CSU. В CSU/DSU могут встраиваться схемы сжатия передаваемых данных, а также резервные коммутируемые порты. Часто устройства CSU/DSU выполняют функции защиты от ошибок, реализуя один из протоколов супермножества HDLC. К сожалению, в области цифровых модемов нет такой жесткой стандартизации на протоколы сжатия данных, защиты от ошибок и вид линейного кодирования, какая существует для аналоговых модемов КТСОП. По этой причине следует с большой осторожностью осуществлять выбор цифровых модемов различных производителей.
Как уже отмечалось, для передачи данных по цифровым линиям требуется выполнить определенное преобразование исходной последовательности. Такое преобразование часто носит название линейного кодирования (кодирования для линии передачи). Рассмотрим подробнее для чего и как оно делается.
2.6. Линейное кодирование
Данные пользователя, поступающие от DTE, уже являются гщфровыми, представленными в униполярном или биполярном коде без возврата к нулю — NRZ (NonReturn to Zero). При передаче данных на большие расстояния в коде NRZ возникают следующие проблемы:
- С течением времени нарастает постоянный ток, блокируемый некоторыми электрическими устройствами цифрового тракта, например, трансформаторами, что приводит к искажению передаваемых импульсов.
- Изменение постоянного тока в цепи отрицательно сказывается на функционировании устройств, получающих питание из линии (репитеры или CSU).
- Передача длинных серий нулей или единиц приводит к нарушению правильной работы устройств синхронизации.
- Отсутствует возможность контроля возникающих ошибок на уровне физического канала.
Перечисленные проблемы решаются при помощи линейного кодирования. Параметры получаемого линейного сигнала должны быть согласованы с характеристикой используемой линии и отвечать ряду следующих требований:
- Энергетический спектр линейного сигнала должен быть как можно уже. В нем должна отсутствовать постоянная составляющая, что позволяет повысить верность либо дальность передачи.
- Структура линейного сигнала должна обеспечивать возможность выделения тактовой частоты на приемной стороне.
- Необходимо обеспечить возможность постоянного контроля за ошибками на уровне физической линии.
- Линейный код должен иметь достаточно простую техническую реализацию.
Формирование требуемого энергетического спектра может быть осуществлено соответствующим изменением структуры импульсной последовательности и выбором нужной формы импульсов. Например, даже сокращение длительности импульсов в два раза (биимпульсный код с возвратом к нулю, RZ) вдвое уменьшает уровень постоянной составляющей и увеличивает уровень тактовой составляющей в спектре такого сигнала.
Различают неалфавитные (1В1Т) и алфавитные (mBnT) коды (В — двоичное, Т — троичное основание кода). При m>n скорость передачи снижается. Предельной помехоустойчивостью обладают сигналы, элементы которых равны, но противоположны по полярности. Примеры наиболее популярных линейных кодов приведены на рис. 2.14.
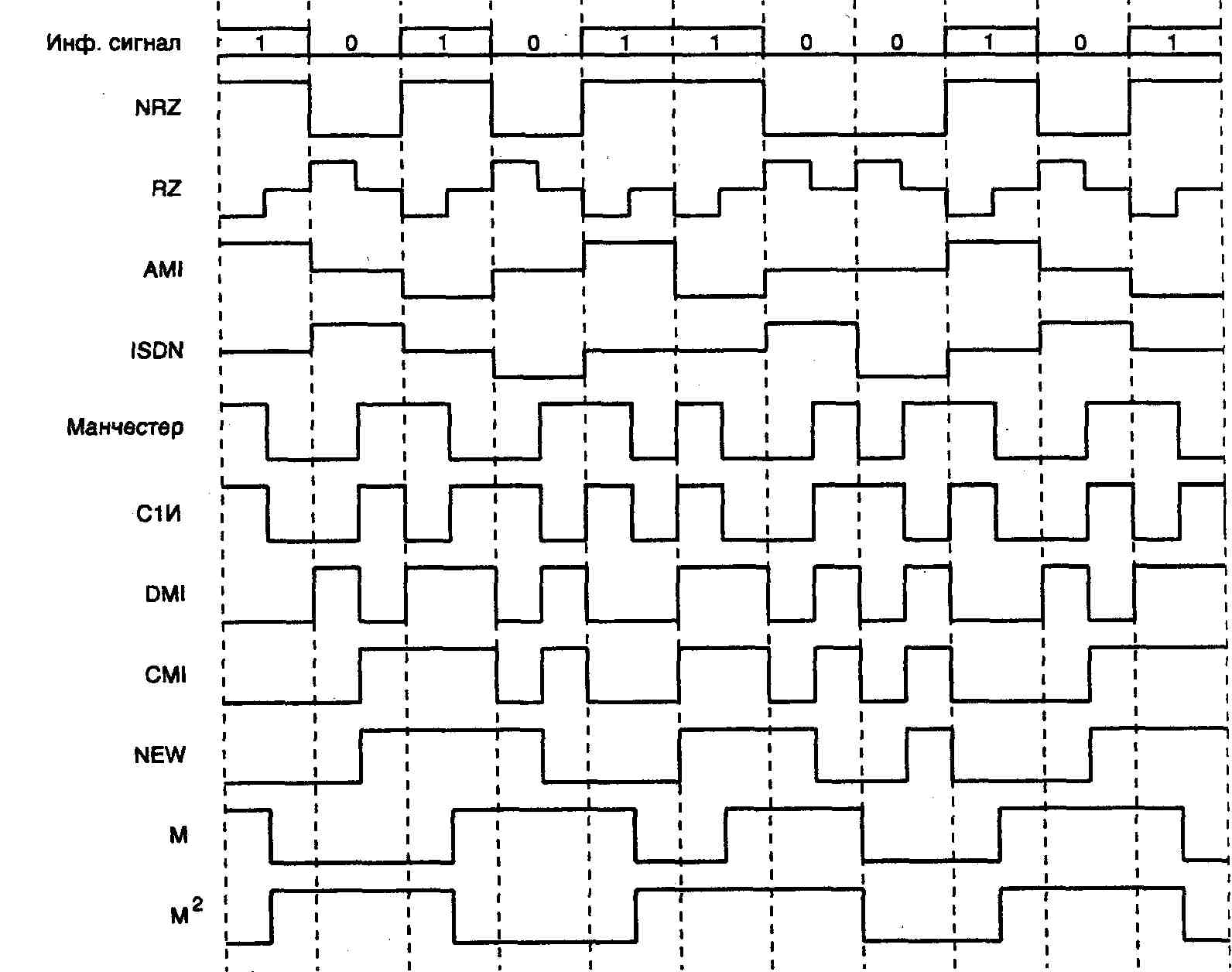
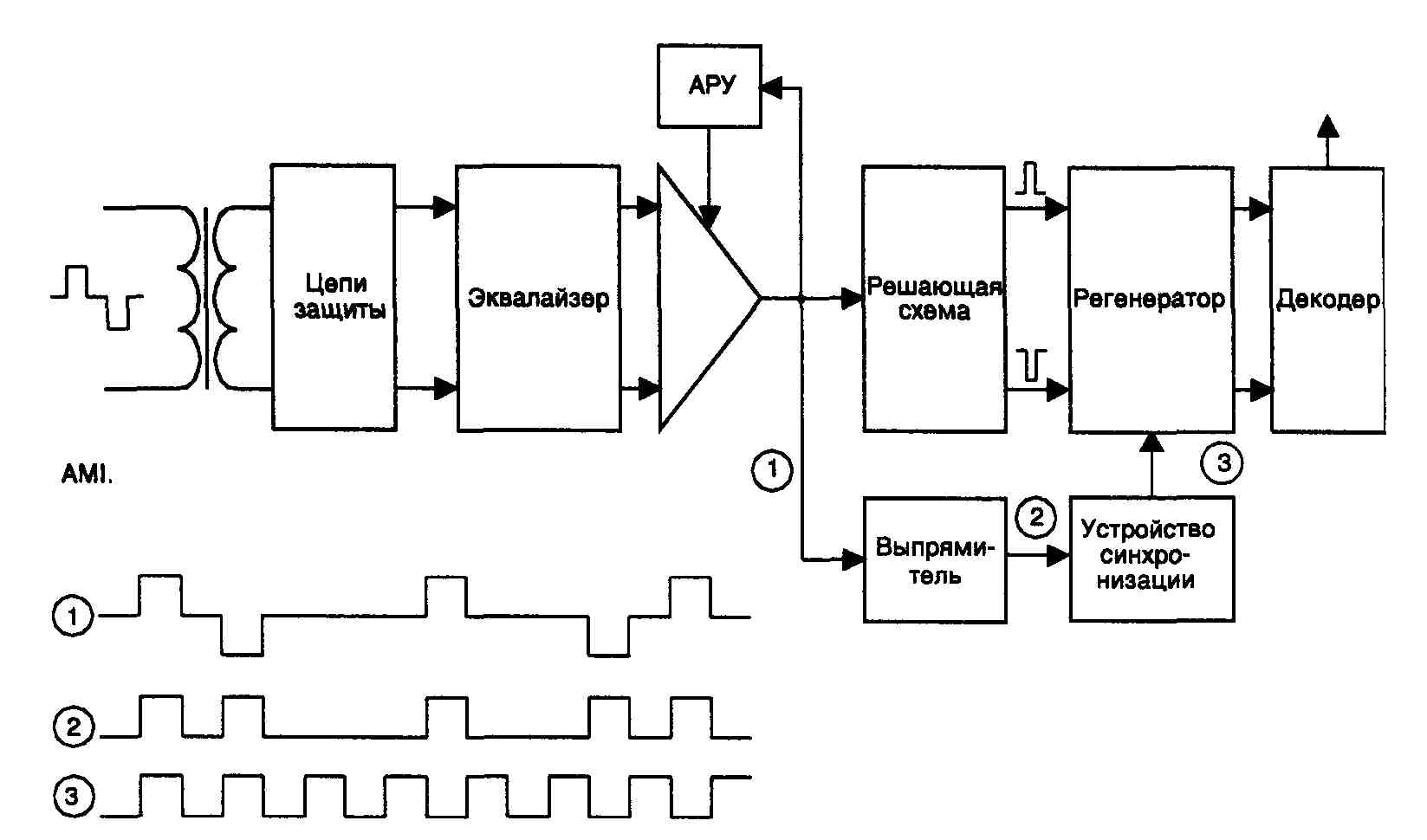
Квазитроичный сигнал с чередованием полярности импульсов AMI (Alter nete Mark Inversion) получают из двоичного в результате преобразования, при котором нули исходного двоичного кода передаются импульсами нулевой амплитуды, а единицы — импульсами чередующейся полярности и вдвое меньшей длительности. Сигналы с кодом AMI требуют раздельной регенерации положительных и отрицательных импульсов (рис. 2.15) при их восстановлении в приемниках и репитерах. Информация о синхронизирующем сигнале, как правило, выделяется после выпрямления квазитроичного сигнала в резонансном устройстве синхронизации. Недостатком кода AMI является то, что при появлении в информационной последовательности серий "нулей" резко снижается уровень синхронизирующей составляющей сигнала, что приводит к срыву синхронизации.
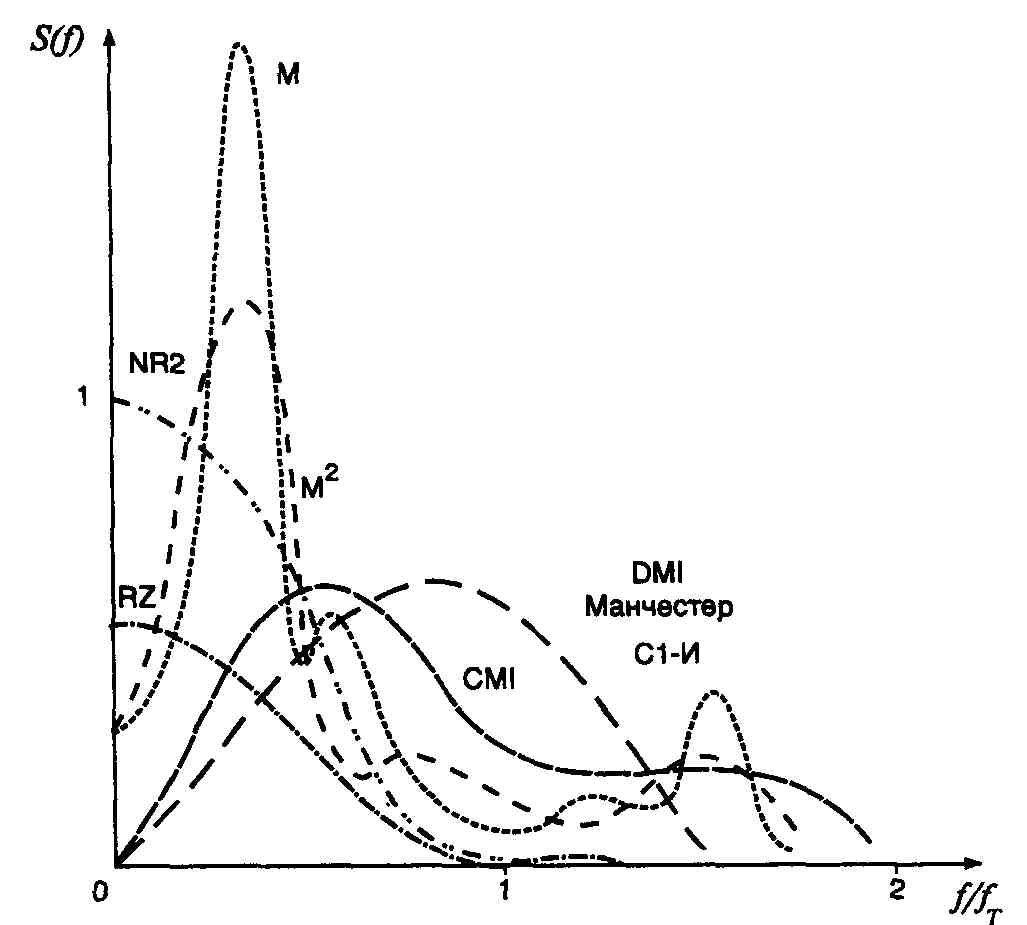
Наиболее широкое распространение получили двухуровневые линейные коды с удвоением скорости передачи класса 1В2В (преобразование группы из одного двухуровневого символа в группу из двух двухуровневых символов), обладающие высокой помехозащищенностью, простотой преобразования и выделения тактовой частоты. Однако частота следования импульсов таких кодов, а следовательно, и требуемая полоса частот передачи вдвое превышает частоту следования исходной двоичной последовательности. К таким кодам относятся коды Манчестер, DMI, CMI, NEW, код Миллера (М), М2, код отечественного стыка С1-И (С1-ФЛ-БИ) и ряд других менее популярных.
Код Манчестер характеризуется однозначным соответствием последовательности чередования импульсов внутри тактового интервала. А именно, "1" исходного цифрового сигнала передается нулевым импульс в первом полутактовом интервале и единичным — во втором. Для символа "0" принимается обратный порядок чередования импульсов (биимпульс 10). Аналогичный код, в котором символ "1" передается двоичной парой 10, а символ "0" — парой 01, называется кодом Манчестер-II.
На стыке С1-И символу "1" входной информационной последовательности соответствует биимпульс 10 или 01, совпадающий с предыдущим, а символу "0" — биимпульс 10 или 01, инверсный по отношению к предыдущему биимпульсу. Другими словами, данный код является относительным, подобно тому, который используется при модуляции методом ОФМ. Относительное кодирование позволяет решить проблему неопределенности фазы биимпульса на приемной стороне. В результате этого стык С1-И не боится ошибок типа "зеркальный прием", или "обратная работа" (инверсия знаков) и переполюсовки контактов физической линии или используемых разъемов.
Энергетические спектры ряда линейных кодов приведены на рис. 2.16, где ft — тактовая частота следования исходных двоичных символов. Эти спектры позволяют судить о частотной эффективности и свойствах синхронизации наиболее популярных линейных кодов.